


Как с помощью КОМПАС-3D увидеть мир с высоты птичьего полета
« Назад
Небесные роботы
Воздушные шары, планеры, дирижабли, вертолеты, самолеты, космические корабли — чего только не придумал человек, чтобы воплотить свою давнюю мечту — оторваться от земли. Для современных людей полеты перестали быть чудом, но что делать, если в тебе все же живет изобретатель, которого манит небо? Взять КОМПАС-3D, смоделировать квадрокоптер и отправить его в полет! Именно так и поступил Александр Железнов, студент Санкт-Петербургского политехнического университета, для которого создание летательных аппаратов — и хобби, и наука.
Александр Железнов — бакалавр Института металлургии, машиностроения и транспорта СПбПУ и резидент «Фаблаб Политех», открытой высокотехнологичной мастерской для молодежи, где и был воплощен в жизнь проект квадрокоптера — мультироторного беспилотного летательного аппарата с вертикальным взлетом и посадкой.
Полет квадрокоптера весьма схож с полетом классического вертолета: при этом отсутствие аппарата перекоса сильно упрощает конструкцию, а из подвижных элементов остаются лишь электродвигатели. В зависимости от назначения характеристики мультикоптеров сильно разнятся. Даже время полета может варьироваться от нескольких минут до нескольких часов. Назначение это, по словам Александра, может быть самым разнообразным — начиная от аэрофотосъемки и киносъемки до ретрансляции радиосигналов, разведки местности, инспекции здании и сооружений. И конечно же, квадрокоптеры используются в авиамодельном спорте!
Создание квадрокоптера — процесс не из легких. В реализации инженерной идеи — от разработки модели и чертежей до расчетов технических характеристик — Александру Железнову помогает система КОМПАС-3D!
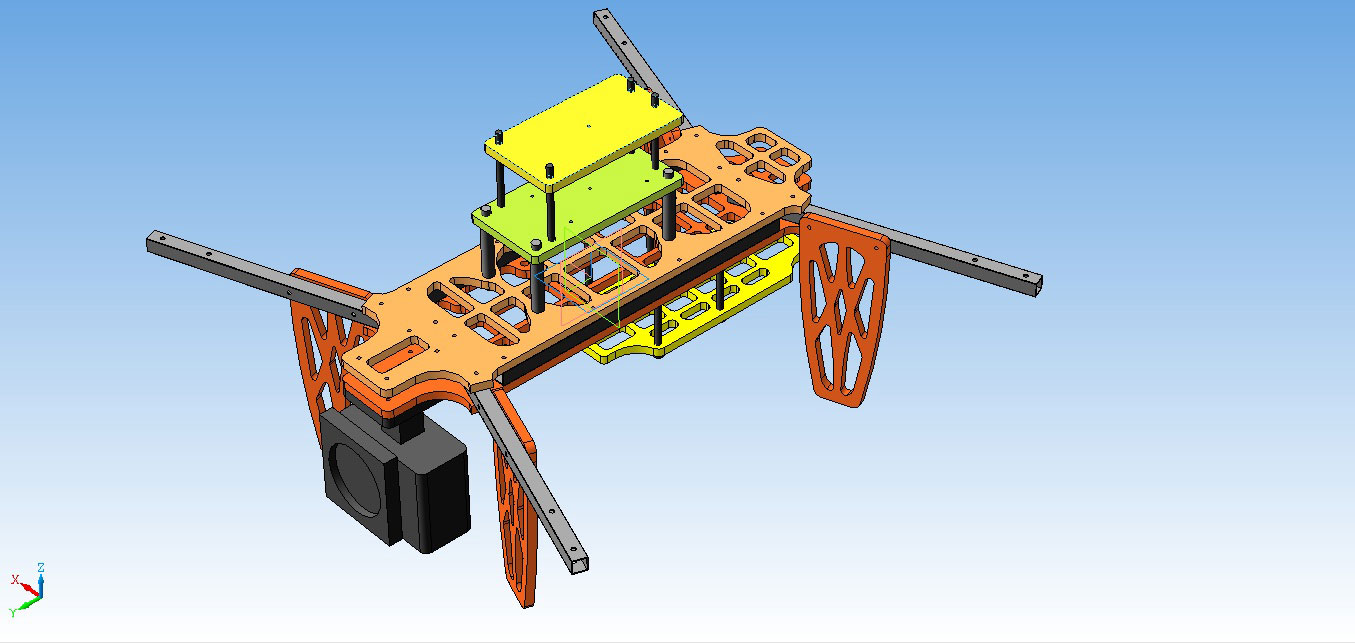
Модель квадрокоптера, выполненная в КОМПАС-3D
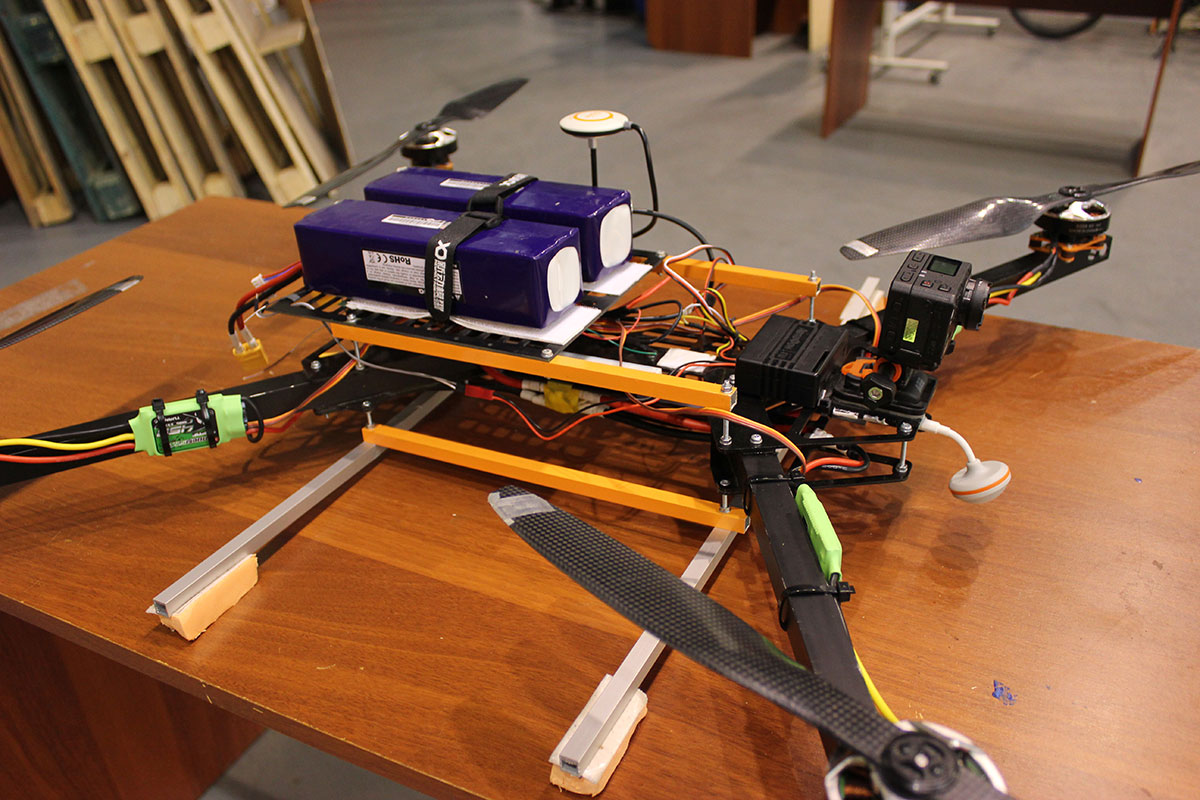
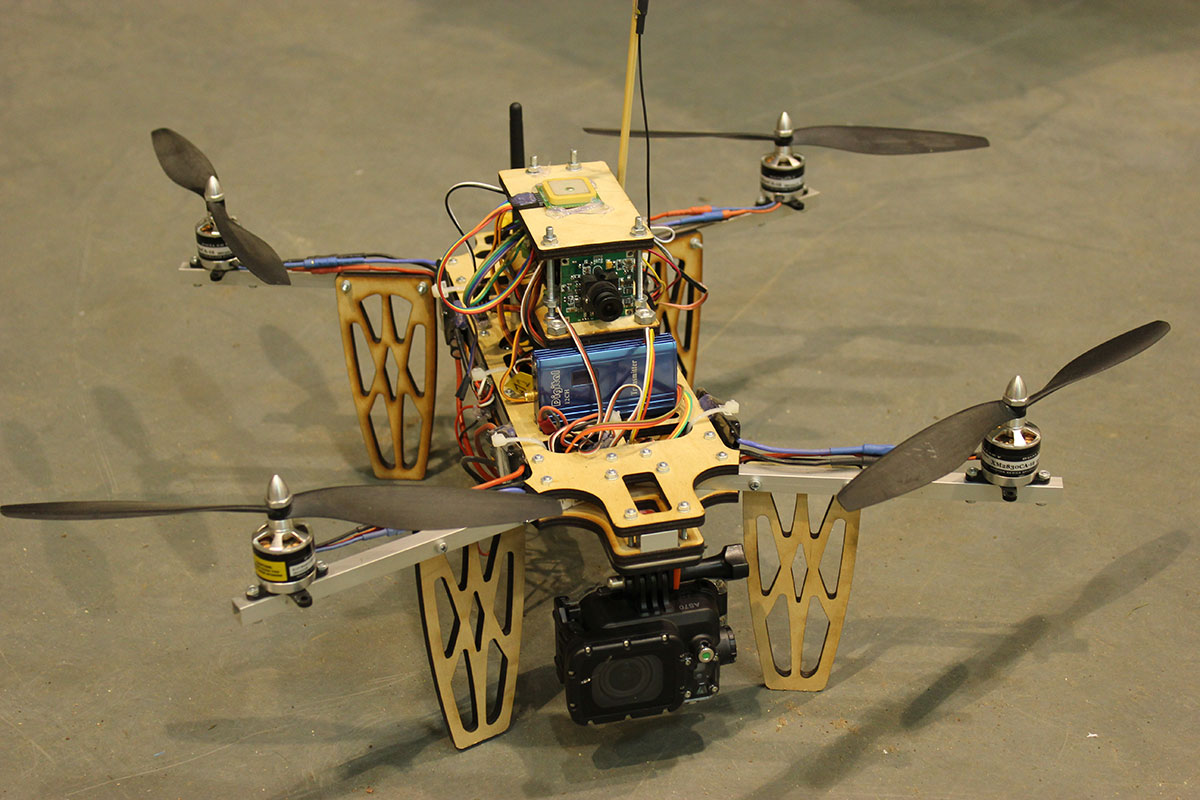
Очень скоро он взлетит!
Кстати, Александр в «Фаблабе» не только набирается опыта в создании коптеров, но и делится им с ребятами, которые хотят больше знать о «небесных роботах». Есть и те, кто обращается к Александру по вопросам «аренды» летательного аппарата — для проведения аэро- и фотосъемки, для художественных целей. Но все-таки квадракоптеры для начинающего инженера — это скорее хобби и научно-практическое творчество, чем бизнес. «Сейчас много говорят о будущем мультикоптеров, об использовании их, например, для доставки товаров из интернет-магазинов. Но, на мой взгляд, перспективы тут туманные: городская зона очень сложна для управления — много турбулентных потоков, проводов между зданиями, — рассказывает Александр. — Ведутся и научные исследования в области дальнейшей роботизации коптеров. Возможно, скоро человек вообще не будет участвовать в управлении!».
У самого Александра Железнова планы на ближайшее будущее тоже интересные: проектирование испытательного стенда для винтомоторной группы и участие с проектом «Квадрокоптер» в Конкурсе «Будущие АСы КОМПьютерного 3D-моделирования 2015»!
В октябре Александр Железнов представил свою разработку на церемонии награждения Конкурса «Будущие АСы КОМПьютерного 3D-моделирования 2014», где рассказал о процессе создания квадрокоптера и вместе с участниками церемонии отправил его в полет!


Поделиться:
Комментарии
Комментариев пока нет
Пожалуйста, авторизуйтесь, чтобы оставить комментарий.



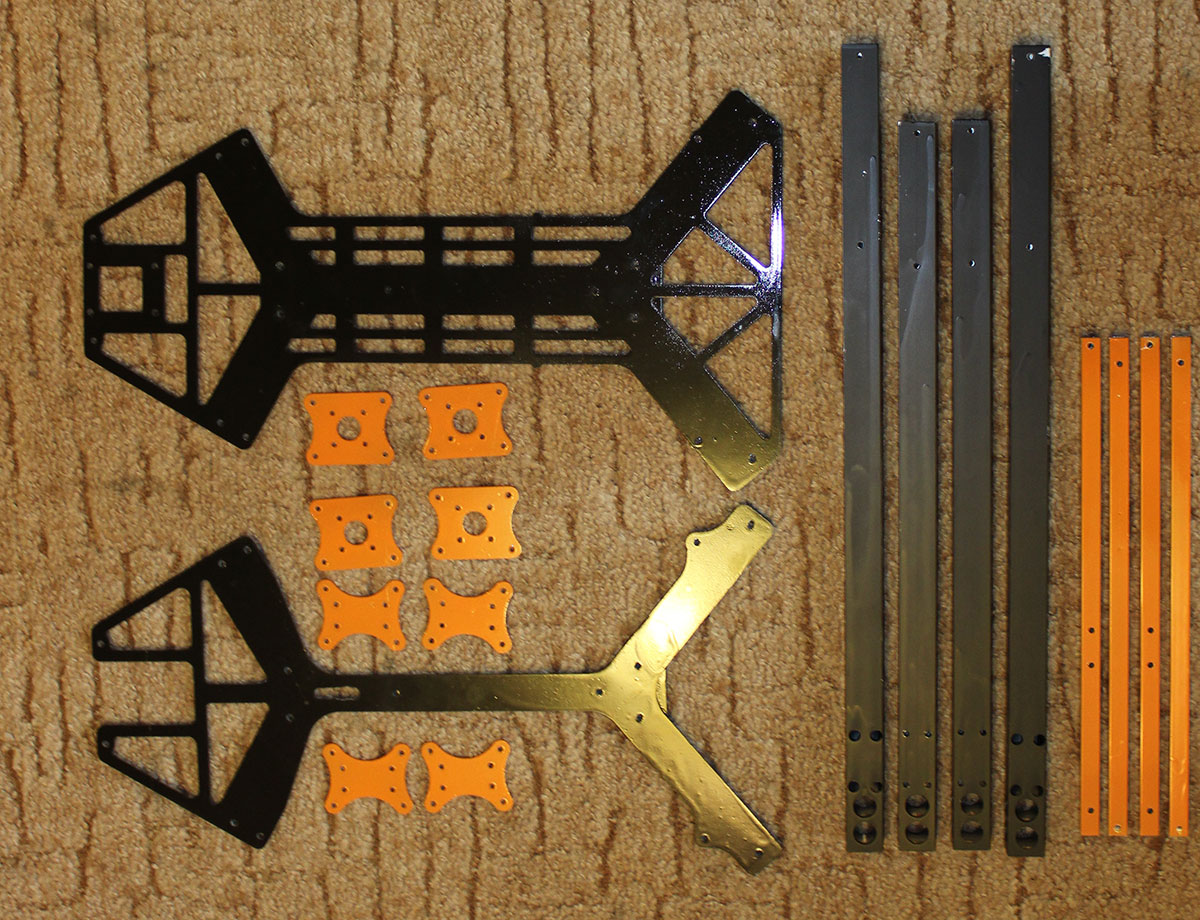
«В КОМПАС-3D я использую как трехмерное моделирование, так и чертежи. Для моих целей система подходит больше всего — ведь КОМПАС-3D изначально подготовлен для работы в соответствии с действующими ГОСТами. Первым делом определяются задачи, которые должен решать будущий аппарат — от этого зависит масса, расположение и габариты полезной нагрузки, выбираются желаемые технические характеристики. Следующий шаг — составляющие части (моторы, пропеллеры, аккумуляторы). Когда картина ясна, можно приступать к первичному эскизу рамы для того, чтобы определить основные геометрические параметры и расположение частей будущего коптера. Конструкцию рамы я предпочитаю разрабатывать сам — по сути, в этом и заключается мое хобби. На этом этапе можно приблизительно подсчитать полетный вес и приступить к уточненному расчету. Затем я берусь за разработку 3D-модели и более точной, хотя еще не окончательной, конструкции рамы. Тут важно выполнить проверку — все ли элементы правильно стыкуются, хватает ли места для бортового оборудования и т.п. Если все в порядке, то можно приступить к борьбе с «лишним весом». Чем летательный аппарат легче, тем лучше! В процессе работы рама «худеет» процентов на 30, а то и больше. Когда проектные работы завершены, начинается изготовление рамы, производится её сборка и монтаж деталей. Кстати, основным преимуществом своих первых рам я считаю легкодоступность и легкообрабатываемость материалов. Я использую обыкновенную фанеру (например, обрезки от других проектов «Фаблаб Политех») и алюминиевый бокс, который тоже легок и прочен. Детали вырезаю на станке с лазерной резкой. Ну а кроме крепежа для рамы больше ничего и не требуется!»